Least-Squares Reverse Time Migration through Devito and Automatic Differentiation¶
@Author: Francesco Picetti - picettifrancesco@gmail.com
In this tutorial, we put together torch's Automatic Differentiation abilities and the OccamyPy physical operators (well, actually Devito's) for RTM. Basically, we can write a standard pytorch optimization loop with the modeling provided by OccamyPy; the tricky part is to insert a linear operator (i.e., Born) in the AD graph.
To use this notebook, we need devito installed. On your occamypy-ready env, run
pip install --user git+https://github.com/devitocodes/devito.git
import torch
import occamypy as o
import born_devito as b
# Plotting
from matplotlib import rcParams
from mpl_toolkits.axes_grid1 import make_axes_locatable
import matplotlib.pyplot as plt
rcParams.update({
'image.cmap' : 'gray',
'image.aspect' : 'auto',
'image.interpolation': None,
'axes.grid' : False,
'figure.figsize' : (10, 6),
'savefig.dpi' : 300,
'axes.labelsize' : 14,
'axes.titlesize' : 16,
'font.size' : 14,
'legend.fontsize': 14,
'xtick.labelsize': 14,
'ytick.labelsize': 14,
'text.usetex' : True,
'font.family' : 'serif',
'font.serif' : 'Latin Modern Roman',
})WARNING! DATAPATH not found. The folder /tmp will be used to write binary files
/nas/home/fpicetti/miniconda3/envs/occd/lib/python3.10/site-packages/dask_jobqueue/core.py:20: FutureWarning: tmpfile is deprecated and will be removed in a future release. Please use dask.utils.tmpfile instead.
from distributed.utils import tmpfile
Setup¶
args = dict(
filter_sigma=(1, 1),
spacing=(10., 10.), # meters
shape=(101, 101), # samples
nbl=20, # samples
nreceivers=51,
src_x=[500], # meters
src_depth=20., # meters
rec_depth=30., # meters
t0=0.,
tn=2000., # Simulation lasts 2 second (in ms)
f0=0.010, # Source peak frequency is 10Hz (in kHz)
space_order=5,
kernel="OT2",
src_type='Ricker',
)def unpad(model, nbl: int = args["nbl"]):
return model[nbl:-nbl, nbl:-nbl]create hard model and migration model
model_true, model_smooth, water = b.create_models(args)
model = o.VectorNumpy(model_smooth.vp.data.__array__())
model.ax_info = [
o.AxInfo(model_smooth.vp.shape[0], model_smooth.origin[0] - model_smooth.nbl * model_smooth.spacing[0],
model_smooth.spacing[0], "x [m]"),
o.AxInfo(model_smooth.vp.shape[1], model_smooth.origin[1] - model_smooth.nbl * model_smooth.spacing[1],
model_smooth.spacing[1], "z [m]")]
model_extent = [0., 1000., 1000., 0.]Define acquisition geometry
rec = b.build_rec_coordinates(model_true, args)
src = [b.build_src_coordinates(x, args["src_depth"]) for x in args["src_x"]]create the common shot gather (CSG) data¶
d = o.VectorTorch(b.propagate_shots(model=model_true, src_pos=src, rec_pos=rec, param=args))
assert d[:].requires_grad is Falsefig, axs = plt.subplots(1, 1, sharey=True)
axs.imshow(d.plot(), clim=o.plot.clim(d[:]),
extent=[d.ax_info[1].o, d.ax_info[1].last, d.ax_info[0].last, d.ax_info[0].o])
axs.set_xlabel(d.ax_info[1].l)
axs.set_ylabel(d.ax_info[0].l)
fig.suptitle(r"Nonlinear data: $\mathbf{d}$")
plt.tight_layout()
plt.show()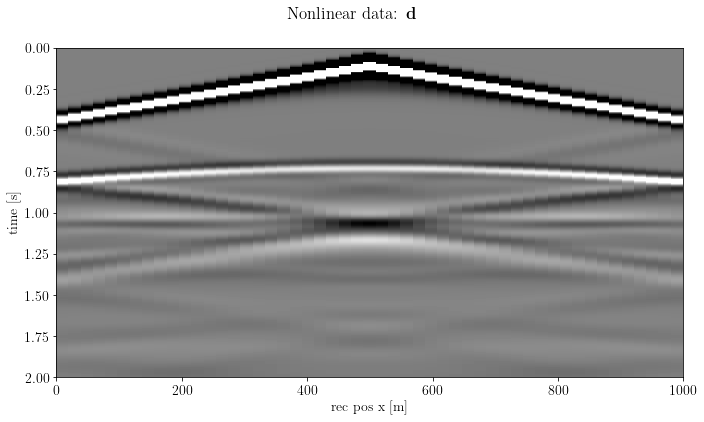
Instantiate the Born operator...¶
B = b.BornSingleSource(velocity=model_smooth, src_pos=src[0], rec_pos=rec, args=args)... and cast it to an Autograd function¶
B_ = o.torch.AutogradFunction(B)Learning paradigm¶
instantiate the model as a "learnable" vector, i.e., a new kind of VectorTorch that encapsulate a tensor attached to the AD graph
m = o.torch.VectorAD(torch.zeros(model.shape), ax_info=model.ax_info)
m.setDevice(None)
assert m[:].requires_grad is Trueinstantiate the optimizer that will work on the model
opt = torch.optim.SGD([m.getNdArray()], lr=1)define the objective function terms: the mean squared error...
mse = torch.nn.MSELoss().to(m.device)and more complex terms (the TV, for example) that can be based on OccamyPy operators!
G = o.torch.AutogradFunction(o.FirstDerivative(model, axis=0))
l1 = torch.nn.L1Loss().to(m.device)
tv = lambda x: l1(G(x), torch.zeros_like(x))Optimization loop¶
epochs = 10for epoch in range(epochs):
# modeling
d_ = B_(m)
# note: things can be a lot complicated! Deep Priors, CNN-based denoisers, ecc ecc
# objective function
loss = mse(d_.float(), d[:]) + 0.1 * tv(m.getNdArray())
# model update
opt.zero_grad()
loss.backward()
opt.step()
# log
print("Epoch %s, obj = %.2e" % (str(epoch).zfill(3), loss))Epoch 000, obj = 1.44e+00
Epoch 001, obj = 1.02e+00
Epoch 002, obj = 8.32e-01
Epoch 003, obj = 7.27e-01
Epoch 004, obj = 6.63e-01
Epoch 005, obj = 6.20e-01
Epoch 006, obj = 5.89e-01
Epoch 007, obj = 5.66e-01
Epoch 008, obj = 5.47e-01
Epoch 009, obj = 5.32e-01
fig, axs = plt.subplots(1, 1, sharey=True)
axs.imshow(unpad(m.plot()).T, clim=o.plot.clim(m.plot()), extent=model_extent)
axs.set_xlabel(m.ax_info[0].l)
axs.set_ylabel(m.ax_info[1].l)
fig.suptitle(r"$\hat{\mathbf{m}} = \arg \min \Vert \mathbf{B}\mathbf{m} - \mathbf{d} \Vert_2^2 \quad$" + f"after {epochs} iterations of SGD with lr={opt.param_groups[0]['lr']}")
plt.tight_layout()
plt.show()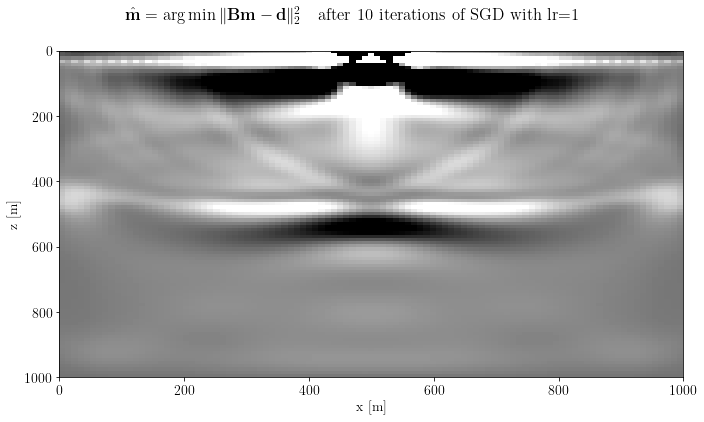
Shot-wise Dask distribution: WIP¶
In principle, an AutogradFunction can be casted also for Dask-distributed operators.
However, distributing a shot to each workers (as done in the previous tutorial) will require the objective function to be computed on different workers, too.
Therefore, we need to merge the distribution paradigms of Dask and PyTorch. Any help will be appreciated!